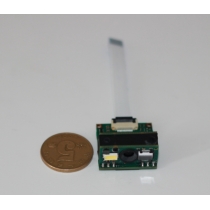
相對于條碼掃描模組,可能大家更熟悉條碼掃描槍,那條碼掃描模組到底是什么呢?條碼掃描模組又被稱為條碼掃描模塊和條碼掃描引擎。它是廣泛應用于自動識別領域的核心識別部件,也是對條碼掃描槍進行二次開發(fā)的關鍵零件之一。
從分類來說,條碼掃描模組可以分為一維碼模組和二維碼模組,按光源可以分為激光模組與紅光模組。前者相信大家會很容易理解,一維碼模組只能掃描一維條碼,二維碼模組可以掃描一維和二維條碼。關于激光掃描模組與紅光掃描模組,可能大家還不是很理解。
激光掃描模組的工作原理是由內部激光裝置打出一個激光光源點,打在一個帶機械結構裝置的反光片上,再依靠震動馬達擺動將激光點打成一成激光線照在條碼上,再經過A-D解碼成數字信號。而紅光掃描模組一般常用LED發(fā)光二級管光源,靠CCD感光元件,再通過光電信號轉換。
激光掃描模組大部分靠點膠來固定機造成械裝置,所以它在擺動的時候往往容易損壞,擺片脫落,所以我們經常可以看到一些激光槍摔落后掃描出來的光源就成了一個點,造成相當高的返修。而紅光掃描模組中間沒有機械結構,所以抗摔性是激光沒法比的,所以穩(wěn)定性要好,紅光掃描模組返修率遠遠低于激光掃描模組。
從激光與紅光的物理原理來看,激光是指受激輻射的能量強,平行度好的光線,而現在大多紅光是由LED發(fā)光,紅光不是我們說的那種紅外線,物理學定義的紅外線是有溫度的物體自發(fā)向外輻射的電磁波,不可見。
紅外線包括所有波長大于紅光的光,而激光指的是某種波長的光,他們兩沒有必然的聯系,不屬于同一領域。激光就是由受激發(fā)射的光放大產生的輻射,紅外線就是肉眼無法觀察到的光譜中頻率較小波長較大的一部分,波長自0.76至400微米,從他們的波長與能量決定在強光下紅光的穿透性和抗干擾性要比激光差,所以說在強光下戶外激光要比紅光好。
相關產品

 銷售熱線:020-87030040,18924129201, 18929502661,18924129401
銷售熱線:020-87030040,18924129201, 18929502661,18924129401
 微信:ivysun888/18924129201
微信:ivysun888/18924129201
 地址:廣東省廣州市黃埔區(qū)黃埔東路3642號豐澤高新產業(yè)園B棟406-410
地址:廣東省廣州市黃埔區(qū)黃埔東路3642號豐澤高新產業(yè)園B棟406-410
 熱門關鍵詞:海康讀碼器,工業(yè)讀碼器,海康工業(yè)視覺相機,OCR字符掃描槍,固定式掃描器,
熱門關鍵詞:海康讀碼器,工業(yè)讀碼器,海康工業(yè)視覺相機,OCR字符掃描槍,固定式掃描器,
 碼上關注艾韋迅
碼上關注艾韋迅
 當前位置:
當前位置: